
Rozważmy stworzenie pojazdu gąsienicowego o dość podstawowej konstrukcji, który można złożyć dosłownie w kilka wieczorów. Całą konstrukcję można z grubsza podzielić na dwie części – podwozie gąsienicowe oraz część elektryczną, która umożliwi zdalne sterowanie maszyną za pomocą pilota.
Produkcja podwozi
Nie będzie potrzebnych wiele materiałów: gąsienice będą napędzane parą motoreduktorów, podstawą całej konstrukcji będzie mały kawałek grubej sklejki, a także będziesz potrzebować kilku plastikowych kół, na których będą się obracać gąsienice. Do maszyny można zastosować motoreduktory o niemal dowolnej odpowiedniej wielkości, idealne są te „żółte”, które można znaleźć w wielu sklepach z częściami radiowymi lub można je kupić na Ali, skrzynia biegów w nich daje przełożenie 1: 48, co w tym przypadku jest wartością najbardziej optymalną.

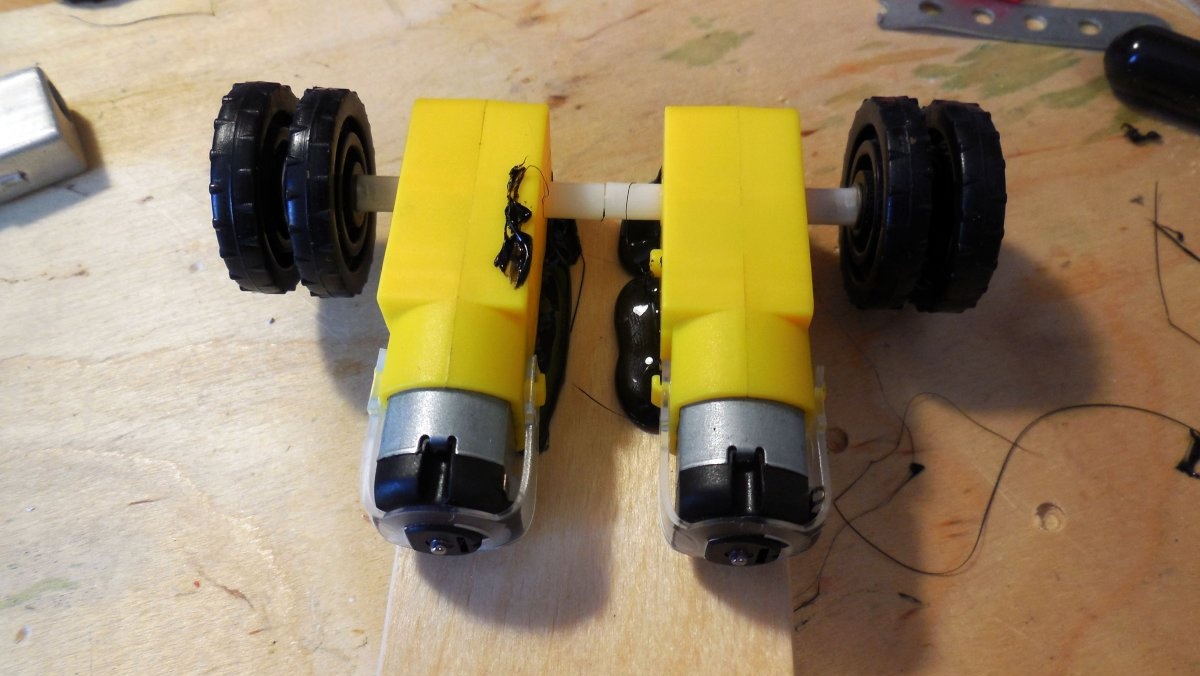
Każda skrzynia biegów ma wyjście na dwa wały, po przeciwnych stronach nadwozia - w przypadku podwozia gąsienicowego wykorzystany zostanie tylko jeden wał z każdego silnika, drugi można całkowicie zdemontować lub pozostawić na wypadek, gdyby silniki te były nadal potrzebne w innych projektach.Konieczne jest przymocowanie kół do wałów - najłatwiej to zrobić, wkręcając w sam wał wkręt samogwintujący (jest pusty w środku), aby koła dobrze się zacisnęły. Aby uzyskać dodatkowe mocowanie i zapobiec odkręceniu się wkrętu samogwintującego, można obficie nasmarować połączenie klejem. Należy pamiętać, że koło jest podwójne - między każdym kołem znajduje się odstęp około 3-4 mm, w przyszłości zostanie nim zamocowana gąsienica.

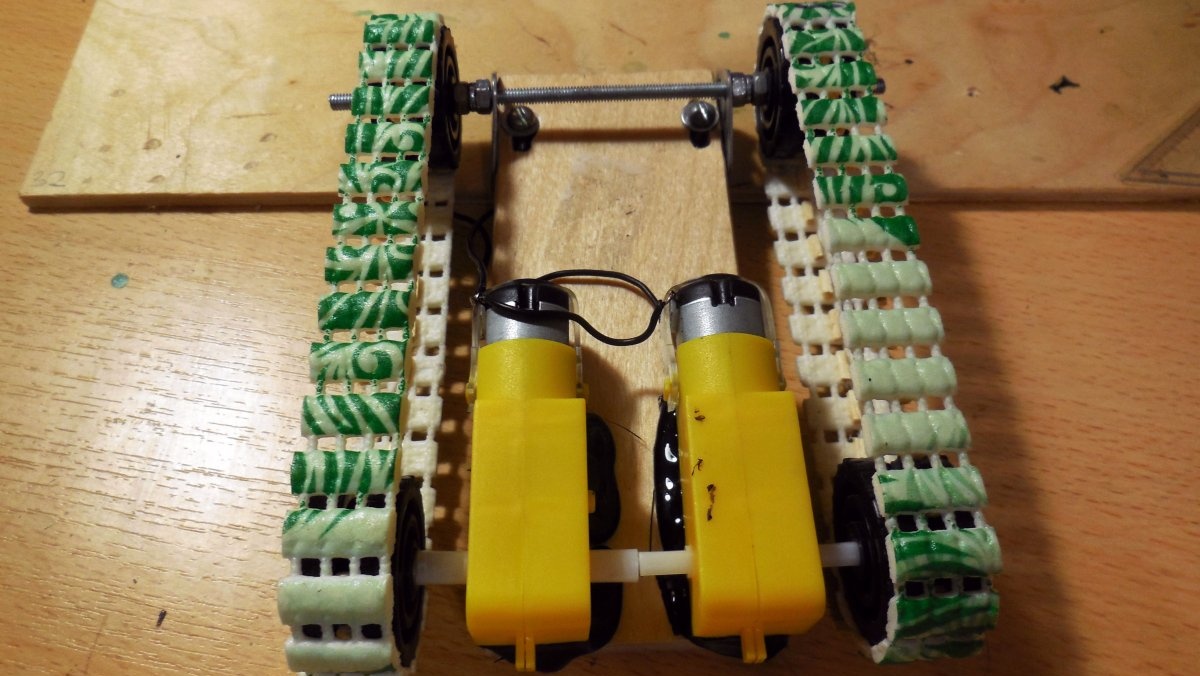
Silniki osadzone są na kawałku wytrzymałej sklejki, której wielkość można dobrać dowolnie, w zależności od pożądanej wielkości maszyny. Te motoreduktory nie zapewniają dogodnych miejsc do mocowania, więc przymocowałem je klejem na gorąco - dobry klej w sztyfcie zapewnia doskonałą jakość połączenia, jak pokazało doświadczenie.
Następnie po przeciwnej stronie silników należy zabezpieczyć narożniki osi przednich kół. W tym celu gorąco polecam użycie części z dziecięcego zestawu konstrukcyjnego z żelaza - można tam znaleźć gotowe narożniki z otworami. Wiercąc otwór w sklejce, należy wziąć pod uwagę, że w przyszłości trzeba będzie wyregulować napięcie torów, dlatego należy wywiercić serię otworów o długości około 1-1,5 cm, które następnie łączy się w jeden podłużna szczelina. W ten sposób cała przednia oś będzie się poruszać w przód i w tył, przykręcona na swoim miejscu.

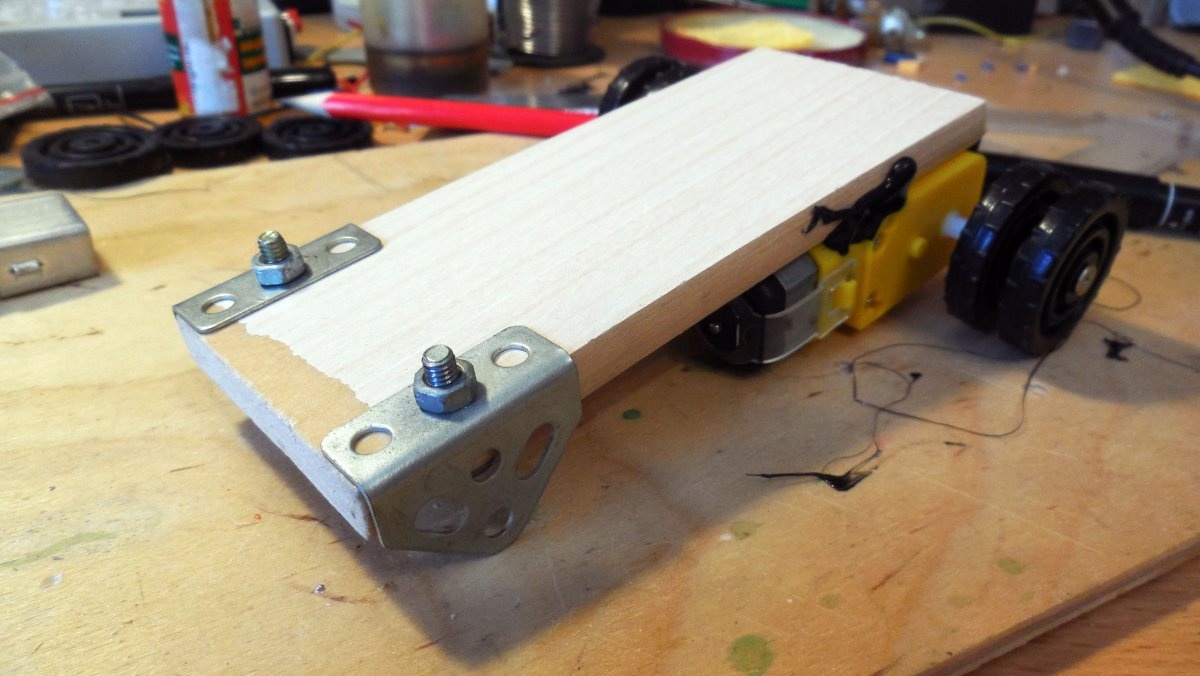
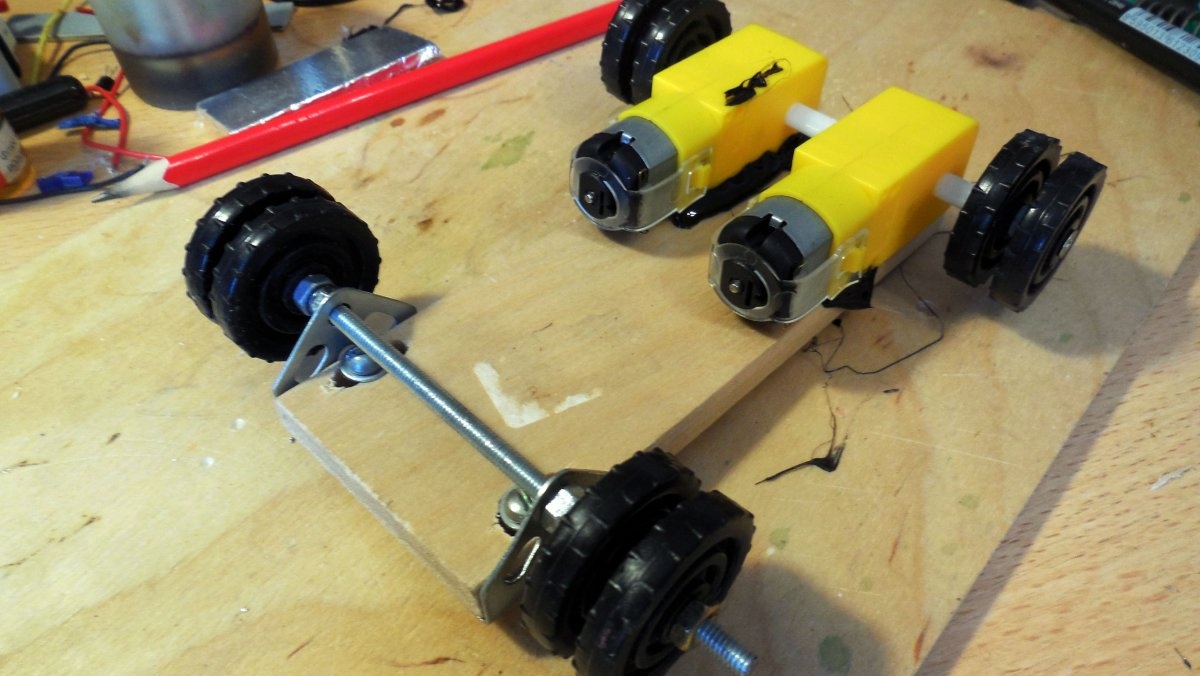
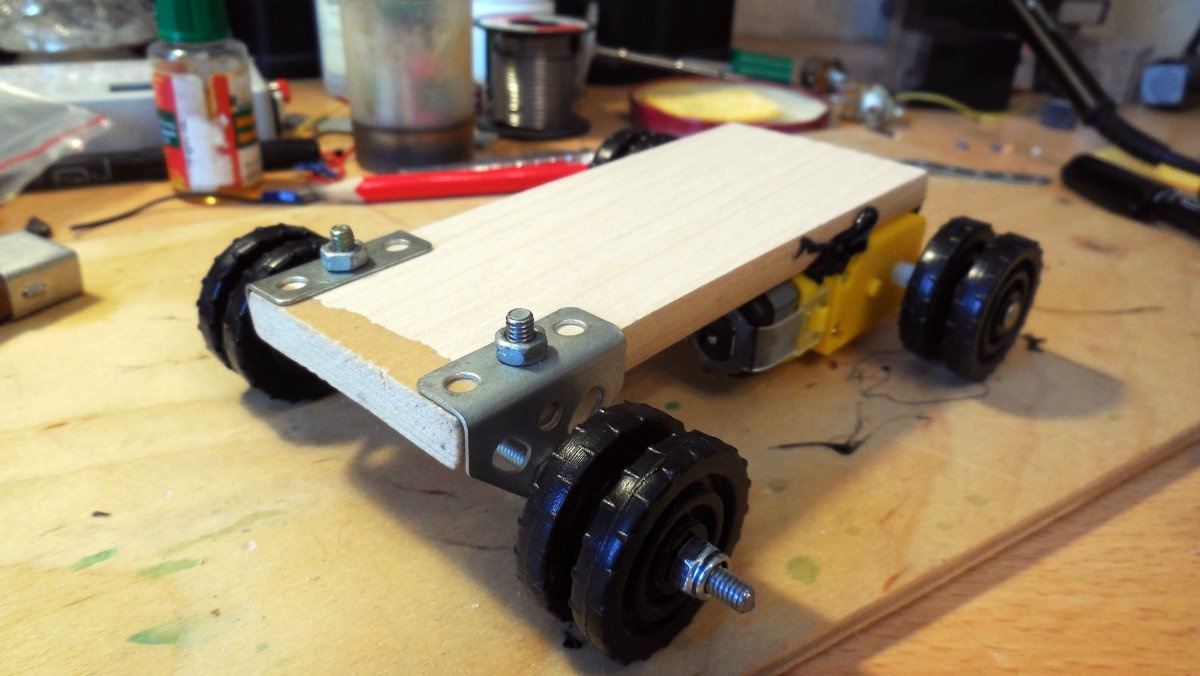
W otwory w rogach wkręca się kołek, wygodnie jest zastosować M4, zapewnia wystarczającą sztywność, a jednocześnie pasuje do otworów w częściach żelaznego konstruktora. Kołek musi być mocno przymocowany do narożników, wygodnie jest w tym celu użyć nakrętek zabezpieczających, które nie odkręcą się same, gdy maszyna zacznie się poruszać. Po bokach zamontowano te same podwójne koła, co z tyłu, z dokładnie takim samym prześwitem.Koła muszą swobodnie obracać się na osi, co można zapewnić za pomocą tych samych nakrętek zabezpieczających. Należy pamiętać, że lewe i prawe koło muszą obracać się niezależnie od siebie. Wziąłem te koła z tego samego żelaznego zestawu konstrukcyjnego, ale podobne można wyciąć z plastiku lub grubej tektury, jeśli złożysz je na kilka warstw i skleisz.
Robienie gąsienic
Trudno sobie jednak wyobrazić doskonałe gąsienice o dobrej przyczepności, które można wykonać z maty łazienkowej z PCV, którą można znaleźć w prawie każdym sklepie z narzędziami. Taki dywanik składa się z wielu elastycznych „pasków”, które są połączone ze sobą równoległymi nitkami, co jest potrzebne do stworzenia gąsienicy. Z maty wycina się pasek o szerokości 1,5-2 cm, który powinien być równy szerokości zastosowanych kółek.

Następnie należy nałożyć taśmę na koła przymocowane do podwozia i przyciąć ją na odpowiednią długość, po czym końce taśmy sklejamy superklejem. Po wyschnięciu kleju możesz wypróbować gąsienicę na podwoziu, a nawet włączyć silnik - gąsienica będzie się obracać, ale szybko spadnie z kół.


Aby gąsienica nie spadła z kół, nawet gdy przyszły pojazd najedzie na przeszkodę, należy wykonać wypukłe ograniczniki pośrodku gąsienicy. Podczas obracania wpadną w szczelinę między kołami, zapobiegając wypadnięciu gąsienicy. Sposobów na wykonanie takich przystanków jest wiele, ja zdecydowałem się przykleić zapałki do każdego „stopnia” gąsienicy, jak pokazało doświadczenie, ta metoda okazała się skuteczna i przy wystarczającym napięciu gąsienica w ogóle nie odpadła. Zapałki tnie się na kawałki o długości 5-6 mm i skleja, jak widać na zdjęciu poniżej, stosuje się ten sam superklej, który zapewnia dobrą przyczepność do materiału maty PCV.


Wszystkie te same czynności należy wykonać z drugą gąsienicą.Po wklejeniu zapałek gąsienice można uznać za gotowe - teraz opierają się na podwoziu i już można sprawdzić, jak będzie jeździł przyszły samochód, przykładając napięcie z akumulatora bezpośrednio na oba silniki. W razie potrzeby należy wyregulować siłę naciągu – gąsienica za słaba będzie się obracać lub odpadać, a gąsienica za ciasna będzie się mocno obracać, co dodatkowo obciąża silnik.

Część elektryczna
W części elektrycznej będziesz potrzebować kilku płytek jednocześnie: płytek odbiornika i nadajnika do przesyłania poleceń z pilota, konwerterów podwyższających napięcie do zasilania silników, a także płytek „pomostowych”, aby każdy silnik mógł obracać się w obu kierunkach. Ogólny schemat jest następujący - płytka nadajnika zostanie zainstalowana w pilocie, płytka odbiornika na podwoziu maszyny. Przetwornice podwyższające przekształcają napięcie z akumulatorów (3,7 - 4,2 woltów) na poziom 7-8 woltów, z którego będą zasilane silniki. Jeśli silniki uzyskają wystarczającą prędkość bezpośrednio z akumulatora, nie ma potrzeby instalowania przetwornic. Obrót silników będzie sterowany obwodami mostkowymi - specjalnymi obwodami z tranzystorami polowymi, które mogą zasilać wyjście napięciem o jednej lub drugiej polaryzacji, w zależności od tego, z którego wejścia (w 1 lub 2) pochodzi sygnał sterujący tablica odbiorcza otrzyma. Na początek przyjrzyjmy się obwodom nadajnika i odbiornika, zostały one przedstawione odpowiednio poniżej.

Mówiąc dokładniej, obwody te nazywane są koderem i dekoderem, a odbiornik i nadajnik to gotowe moduły RX-TX na częstotliwość 433 MHz, które można łatwo kupić na Ali lub w wielu sklepach z częściami radiowymi - Każdy z modułów posiada trzy styki do podłączenia - plus, minus zasilania oraz styk DATA do wysyłania lub odbierania danych.Przedstawione powyżej proste obwody zapewniają protokół przesyłania danych, pozwalający na przetwarzanie 5 naciśnięć przycisków. Do sterowania maszyną potrzebne będą tylko 4 kanały (do przodu, do tyłu, w prawo, w lewo), więc piąty kanał pozostaje wolny i można go wykorzystać do dowolnego celu, np. do włączania i wyłączania reflektorów. Styki TXD i RXD na schematach są połączone odpowiednio ze stykami DATA nadajnika i odbiornika, w przeciwnym razie schematy są proste i prawie nie wymagają objaśnień. Napięcie zasilania samych obwodów wynosi 3,5-5 woltów, jednak jeśli zainstalujesz stabilizatory 78l05 (są one wskazane na schematach), możesz je zasilić napięciem 7 lub większym woltów. Płytki drukowane zapewniają obie opcje zasilania, wystarczy zainstalować zworki w odpowiednich miejscach. W przypadku zastosowania w maszynie zarówno odbiornik, jak i nadajnik mogą być zasilane bezpośrednio z akumulatorów bez stabilizatorów. Każdy z układów posiada mikrokontroler - należy go wgrać odpowiednim firmwarem, firmware znajduje się w archiwum wraz z plikami płytki.
Archiwum ze schematami, oprogramowaniem i płytkami:
Wykonanie pilota
Jako opcję można zastosować gotowy pilot z jakiejś zepsutej/niepotrzebnej zabawki sterowanej radiowo, jeśli jest w nim wystarczająco dużo miejsca na montaż płytki enkodera. Możesz też stworzyć własnego pilota, tak jak ja. Jako podstawę użyłem innego kawałka sklejki, mocując na nim uchwyt na akumulator 18650, płytkę enkodera z modułem odbiornika, a także 4 przyciski, układając je tak, aby maksymalnie ułatwić sterowanie.Należy pamiętać, że na płytce enkodera znajdują się już miejsca do montażu przycisków na płytce - ich montaż nie jest konieczny, z wyjątkiem sprawdzenia funkcjonalności po montażu. Przyciski sterujące wymontowane są z płytki na przewodach, jak na zdjęciach poniżej.


Montaż elektroniki na podwoziu
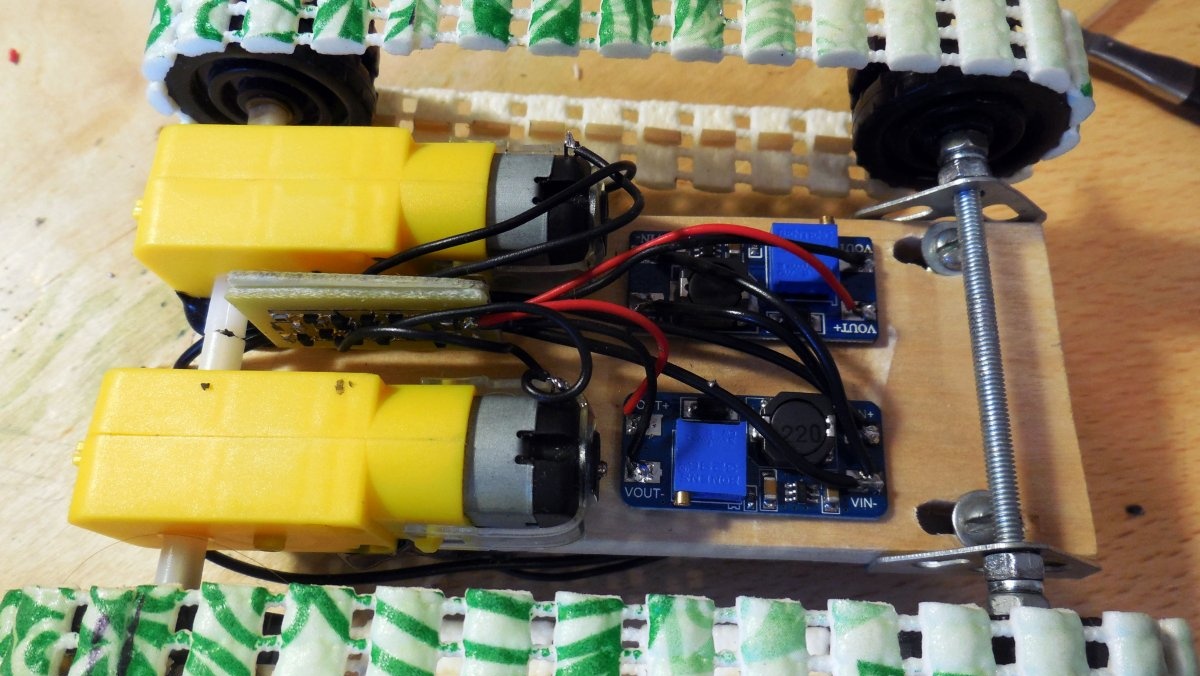
Zatem na samej obudowie oprócz płytki dekodera z modułem odbiornika zostaną zamontowane dwie płytki „pomostowe” i dwa konwertery. Zaletą stosowania dwóch konwerterów, po jednym dla każdego silnika, jest to, że można regulować prędkość każdej ścieżki oddzielnie. Mimo, że motoreduktory są identyczne, to jednak mają pewne różnice w parametrach, więc nawet przy tym samym napięciu zasilania mogą generować nieco inne prędkości obrotowe, a regulując napięcie na wyjściu przetwornic, można uzyskać tę samą prędkość. Nawet niewielkie zniekształcenie prędkości spowoduje, że samochód nie będzie jechał prosto do przodu, ale z lekkim zakrętem. Poniżej na zdjęciu widać wszystkie płytki potrzebne do montażu na podwoziu.

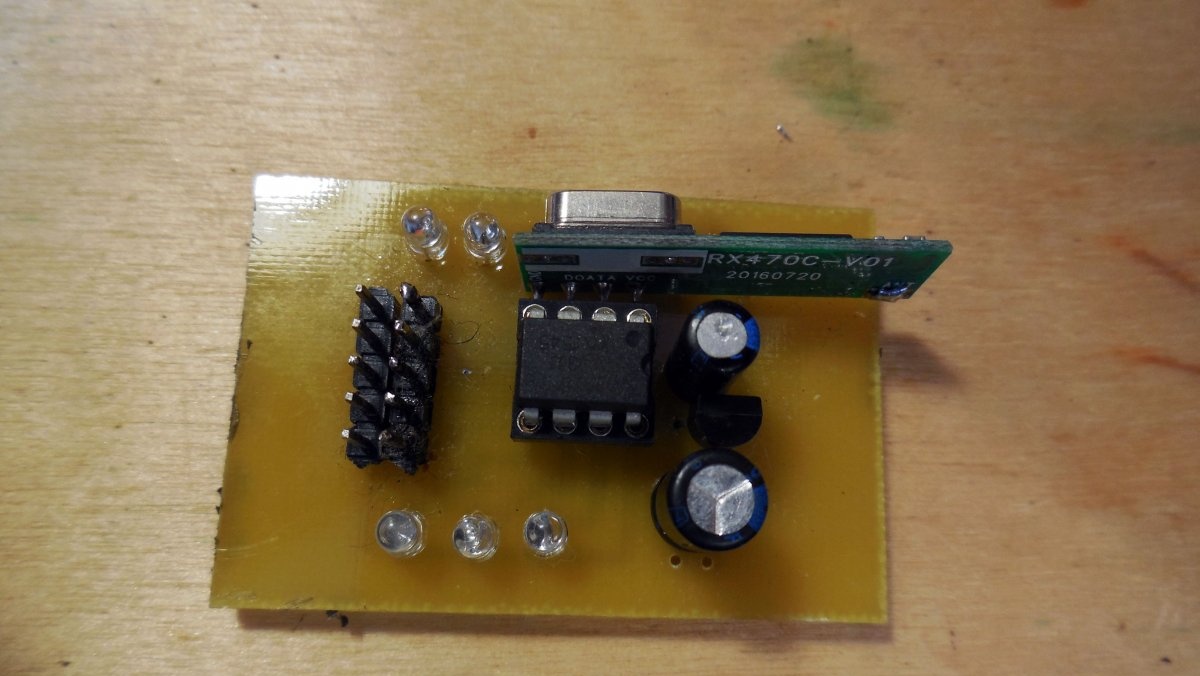
Szczegółowe zdjęcie płytki dekodera. Należy pamiętać, że ona podobnie jak płytka enkodera posiada kilka dodatkowych kondensatorów zasilających - na pewno nie będą one zbędne w urządzeniach z mikrokontrolerami.
Montaż obwodu mostkowego
Wydawałoby się, że potrzebny jest jakiś obwód mostkowy, ponieważ wystarczy po prostu przyłożyć napięcie do silników za pomocą klucza. I naprawdę nie jest to potrzebne, jeśli samochód nie wymaga biegu wstecznego - a praktyka pokazuje, że bez niego nie jest to wcale interesujące. Dlatego konieczne jest zmontowanie małego dodatkowego obwodu, który zapewni zmianę polaryzacji silnika. Zmienia się polaryzacja - zmienia się kierunek ruchu.

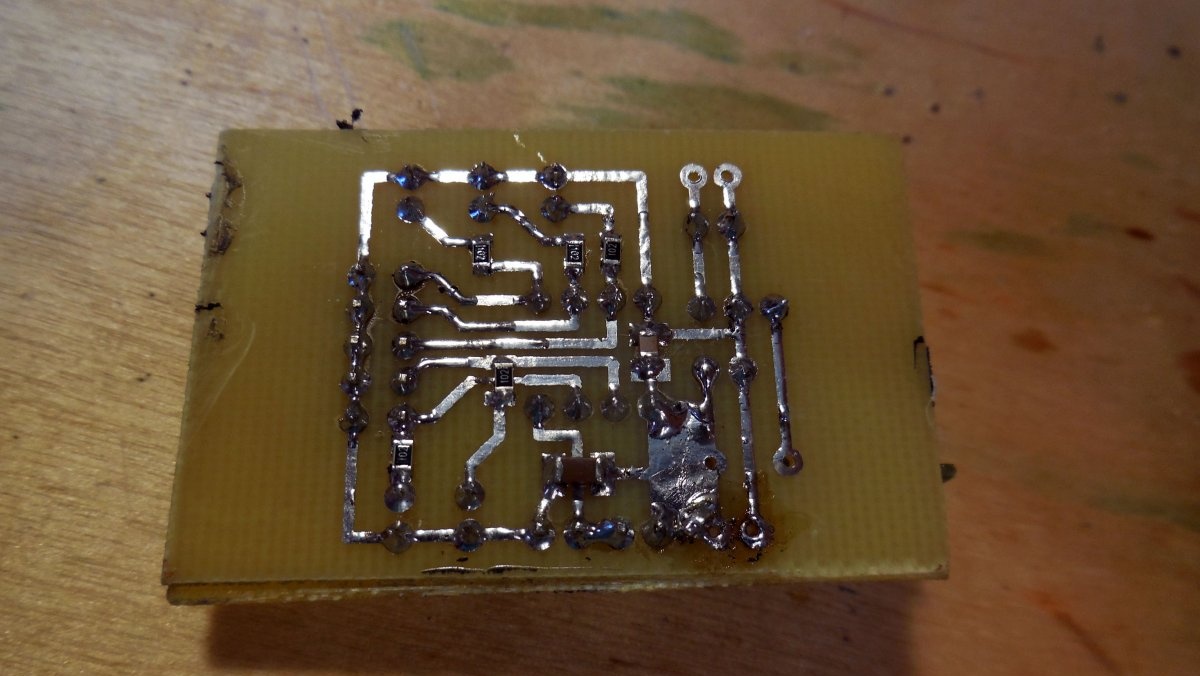
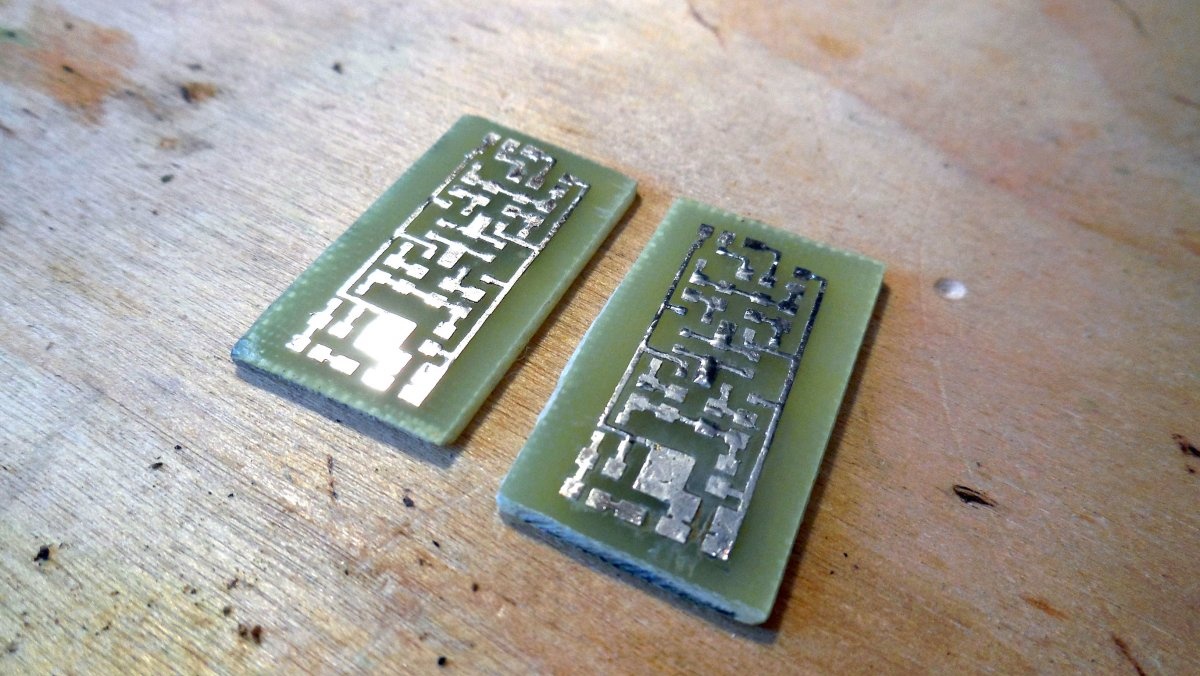
Silnik jest podłączony do tego obwodu i zawiera również dwa wejścia - in1 i in2, przyłóż 3-5 woltów do jednego wejścia - silnik obraca się w jednym kierunku, przyłóż 3-5 woltów do drugiego - silnik obraca się w drugim kierunek. Jeśli napięcie nie jest podawane na żadne wejście lub jest podawane na oba wejścia jednocześnie, silnik się nie obraca, taka jest prosta logika działania. W obwodzie znajdują się 4 tranzystory polowe, które będą przełączać silnik, dlatego muszą być zaprojektowane na wystarczająco duży prąd. Dwa z nich to kanał N, można użyć AO3400, pozostałe dwa to kanał P, odpowiedni jest AO3401. Na schemacie są też dwa tranzystory bipolarne NPN, nada się BC847 lub inny podobny. Aby nie zajmować dużo miejsca na obudowie polecam zmontować ten układ z wykorzystaniem elementów SMD. Diody - dowolne, na przykład 1N4148W. Wejście zasilania tego układu (oznaczone jako 12 V) zasilane jest napięciem z przetwornicy. Należy pamiętać, że obwód należy zmontować w dwóch egzemplarzach - odpowiednio dla lewego i prawego silnika będą one zasilane z jednego i drugiego konwertera. Zdjęcia zmontowanych desek poniżej.

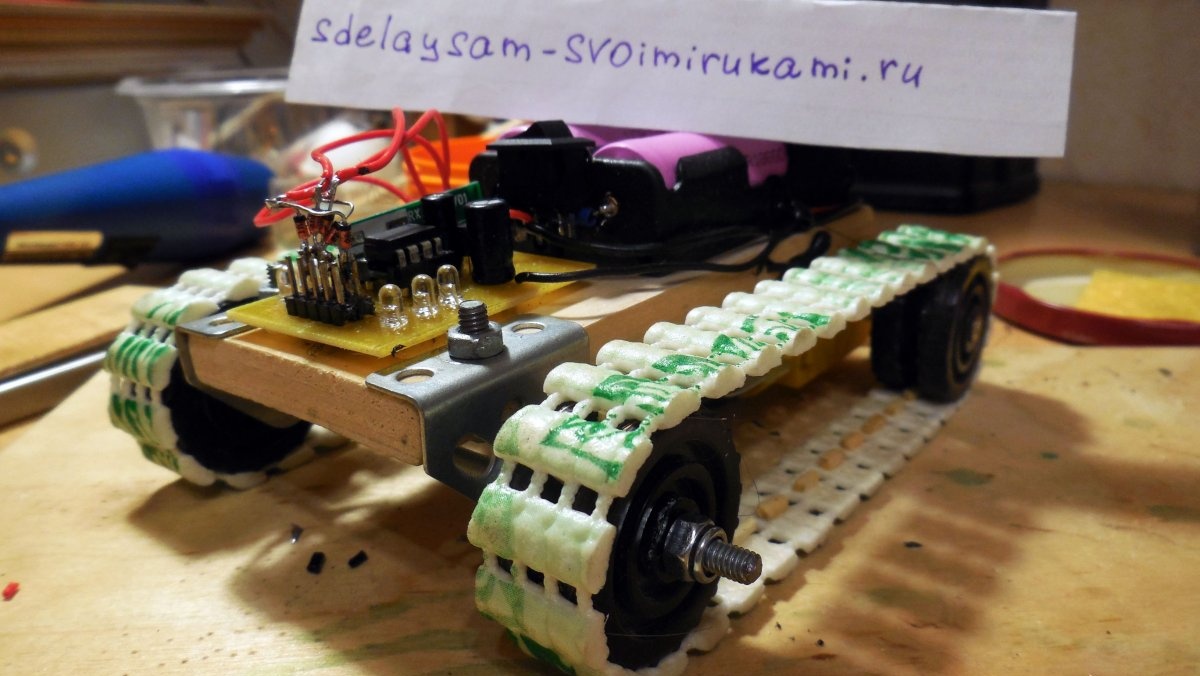
Teraz możesz przejść bezpośrednio do montażu - pierwszym krokiem jest zainstalowanie pary uchwytów na akumulatory 18650 na górze obudowy; cała elektronika będzie z nich zasilana; akumulatory są połączone równolegle.

Przed akumulatorami, w przedniej części, zamontowana jest płytka dekodera, którą można od razu podłączyć za pomocą włącznika do styków uchwytów. Dla wygody ta tablica ma dodatkowo 5 Diody LED – po naciśnięciu klawiszy pilota zaświecą się odpowiednie klawisze Diody LED.

W dolnej części, pod podwoziem, przymocowana jest para konwerterów i para desek mostkowych.Wszystko jest natychmiast połączone przewodami - wejścia konwerterów przez przełącznik do uchwytów, wyjścia konwerterów do zasilania płytek mostkowych, a wyjścia mostów z kolei do silników. Należy wziąć pod uwagę, że silniki pod obciążeniem mogą pobierać dość duży prąd, odpowiednio na wejściu przetworników pobierany prąd będzie około 2 razy większy i w niektórych momentach może osiągnąć 1-1,5 ampera, dlatego należy zasilanie za pomocą dość grubych przewodów.

Pozostaje ostatni, końcowy etap montażu - należy podłączyć wyjścia dekodera (wykorzystane zostaną 4 z 5 wyjść) do wejść mostka (in1, in2), tak aby po naciśnięciu określonych klawiszy na pilocie maszyna reaguje w pożądany sposób. Mianowicie:
- Naciśnięcie „do przodu” - oba silniki obracają się w tym samym kierunku.
- Naciśnięcie „wstecz” - oba silniki obracają się w przeciwnym kierunku.
- Naciśnięcie „w prawo” – lewy silnik obraca się do przodu, prawy silnik obraca się do tyłu, natomiast maszyna obraca się w miejscu zgodnym z ruchem wskazówek zegara.
- Naciśnięcie „w lewo” - prawy silnik obraca się do tyłu, lewy silnik obraca się do przodu, maszyna obraca się w kierunku przeciwnym do ruchu wskazówek zegara.
- Jednoczesne naciśnięcie „do przodu” i „w prawo” - lewy silnik obraca się do przodu, prawy stoi w miejscu, dzięki czemu następuje płynny obrót.
- Jednoczesne naciśnięcie „do przodu” i „w lewo” działa podobnie, ale w drugą stronę.
Aby zaimplementować taką logikę, konieczne jest połączenie wyjść dekodera z wejściami mostka, jak pokazano poniżej.
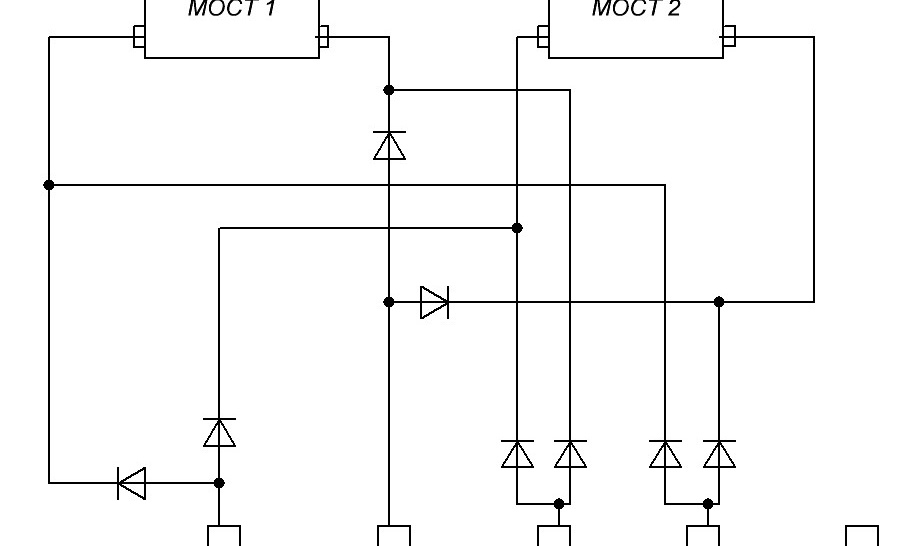
Poniżej pokazane są wyjścia dekodera, jedno z nich jest wolne i można je wykorzystać do innych celów. Można tu zastosować diody takie same jak 1N4148, wlutowane poprzez montaż powierzchniowy bezpośrednio na wyjściach dekodera.
Testy
W tym momencie montaż maszyny jest zakończony, można włożyć baterie i sprawdzić działanie. W takim przypadku nie byłoby błędem sprawdzenie poboru prądu - w przypadku braku poleceń z pilota powinien on być niewielki, około kilkudziesięciu mA. Zasięg pilota będzie zależny od zastosowanych modułów odbiornika i nadajnika – najczęściej zapewniają one niezawodny zasięg odbioru w warunkach miejskich wynoszący około 20-30 metrów, co w zupełności wystarczy do sterowania maszyną. Anteny pomogą znacznie zwiększyć zasięg, można wziąć kawałki drutu miedzianego o długości 17 cm (dla częstotliwości 433 MHz) i przylutować je do styków „mrówki” modułów.


W efekcie powstała bardzo ciekawa zabawka zarówno dla dzieci, jak i dorosłych – tory z maty PCV zapewniają doskonałą przyczepność na każdej powierzchni, dzięki czemu maszyna z łatwością pokonuje przeszkody. Do zalet wersji gąsienicowej zalicza się także łatwość sterowania – nie ma konieczności instalowania dodatkowych mechanizmów sterujących, całe sterowanie odbywa się jedynie poprzez zmianę kierunku obrotu gąsienic. Wadę opisywanej konstrukcji podwozia można nazwać małym „prześwitem” - silniki znajdują się pod spodem i zajmują tam dość dużo miejsca, nie przeszkadza to jednak w przyjemności „jazdy”, a jeśli jest to pożądane, tę wadę można wyeliminować, dodając dodatkową oś dla tylnych kół i umieszczając silniki na górze. Szczęśliwego budynku!











